
PRESS RELEASE
Department of Physical Therapy Science, Medical and Dental Sciences
(修士課程)保健学専攻 理学療法学分野
Department of Physical Therapy Science, Health Sciences
2024.09.27
脳卒中患者の日常生活環境における歩行制御の異質性
研究紹介
脳卒中患者の多くは歩行速度の低下や歩行不安定性・非対称性の増大を特徴とした歩行障害を呈し,転倒リスクや生活範囲の狭小化,生活の質の低下を引き起こします.特に日常生活環境においては,様々な文脈や環境に応じた歩行速度の調整等の歩行制御が求められます.近年,慣性センサー技術の進歩により,日常生活における歩行制御があきらかになってきました.一方,これまでの手法では歩行の時空間パラメータや距離や時間の平均値として扱っており,歩行の連続性や歩行制御の変化を十分に捉えきれていませんでした.また,上記の歩行パラメータは相互に関係しており,従来の歩行制御モデルでは,脳卒中患者の歩行速度は主に歩調によって決定されますが,歩幅や歩行非対称性が歩行速度に与える影響には一貫性はありませんでした.つまり,脳卒中の歩行制御には個別性があることが推測されます.脳卒中患者個々の歩行制御モデルの構築と類型化は歩行機能の相互作用への洞察を深め,個別化されたリハビリテーション戦略に貢献することが期待されます.そこで,本研究では,脳卒中患者の日常生活環境における歩行を計測し,ネットワーク分析を用いて,脳卒中患者個々の歩行制御モデルを構築するとともに,クラスター分析による類型化を行いました.
研究のポイント
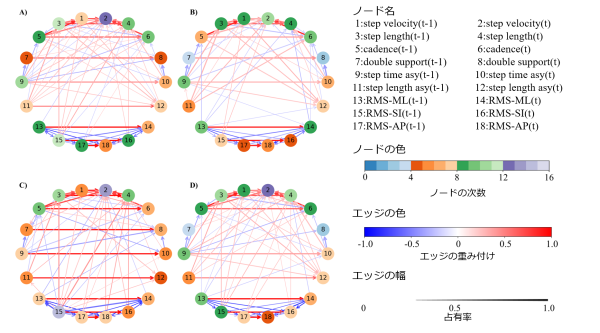
日常生活環境における歩行の時空間的パラメータ間の因果関係を明らかにするとともに,その因果関係に3つのパターンがあることを明らかにしました.
研究内容
<方法>
本研究の目的は,脳卒中患者の日常生活環境における個別の歩行制御モデルを構築し,類型化することでした.そこで,脳卒中患者を対象に腰部に加速度計を装着し,日常生活環境において24時間計測しました.計測された加速度データから歩行の時空間変数を算出し,Linear
Non-Gaussian Acyclic Model(LiNGAM)を使用して歩行の連続性を考慮した時系列的因果探索を行い,各患者における有効非巡回グラフ(DAG)を作成しました.次にスペクトルクラスタリングを使用して各患者のDAGを類型化しました.最期に類型化されたDAGの特徴を分析するために,ベイズロジスティック回帰に基づいた特徴選択を行いました.
<結果>
本研究における脳卒中患者の歩行制御モデルは以下の3つのクラスターに類型化されました:クラスター1;歩行の非対称性と歩行の不安定性が高く,主にケイデンスに基づいて歩行速度を調整する中等度の脳卒中患者,クラスター2;主に歩幅に基づいて歩行速度を調整する軽度の脳卒中患者,クラスター3;主に歩幅とケイデンスの両方に基づいて歩行速度を調整する軽度の脳卒中患者.これらの3つのクラスターは,歩幅速度の調節能,Fugl-Meyer
assessment,歩幅の非対称性,歩幅という4つの変数に基づいて正確に分類できました.これらの脳卒中患者における歩行制御モデルのパターンは,歩行制御の異質性と脳卒中患者の機能的多様性を示唆しています.
 |
研究の意義
脳卒中患者における歩行障害の構造を理解し,異質性を明らかにすることは,個別性の高い精密リハビリテーションの基盤となります.個々の歩行制御のネットワークを解読することで,望ましい機能改善に関連する歩幅や歩行の非対称性等の歩行障害をターゲットにした正確な介入を開発できます.このアプローチにより,よりオーダーメイドで効果的な治療戦略が期待されます.
Nishi Y, Ikuno K, Takamura Y, Minamikawa Y, Morioka S. Modeling the heterogeneity of post-stroke gait control in free-living enviroments using a personalized causal network. IEEE Trans Neural Syst Rehabil Eng. 32: 3522-3530, 2024 doi: 10.1109/TNSRE.2024.3457770.
長崎大学生命医科学域(保健学系)
助教 西 祐樹(ニシユウキ)
Tel: 095-819-7967
Fax: 095-819-7967
E-mail: ynishi@nagasaki-u.ac.jp
- プレスリリースPRESS RELEASE
- 研究紹介RESEARCH
- メンバーMEMBER
- 研究業績Achievements/article
- フォトギャラリーPHOTO
- 書籍紹介BOOK
- アクセスACCESS
- リンクLINK
- お問い合わせCONTACT

長崎大学
〒852-8520
長崎県長崎市坂本1-7-1
長崎大学大学院医歯薬学総合研究科
運動障害リハビリテーション学研究室
TEL 095-819-7967
FAX 095-819-7967


バナ